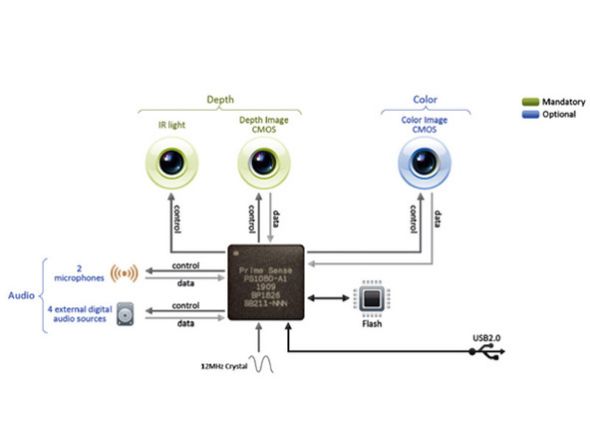
第11步 - 这是PrimeSense的图解,用于解释他们的推荐设计是如何工作的。Kinect是首款(也是唯一一款)采用这一平台的产品。
- 一个摄像头(以及一个红外发射器)提供深度图的输入(据传仅为340x240),而第三个摄像头则以640x280的分辨率探测人的视频光谱。
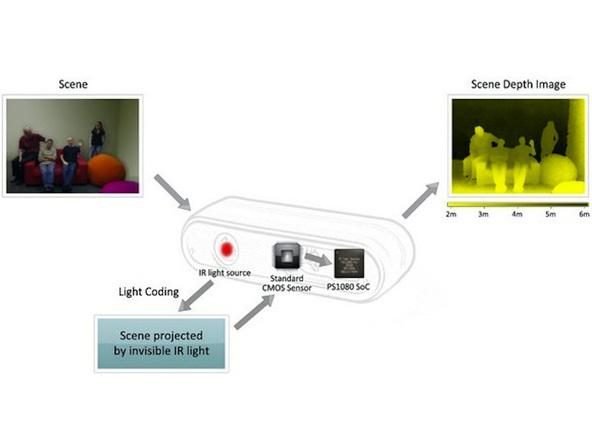
该系统能够以不到1厘米的精度测量2米的距离,但这只是理论上的数据
- 我们听说,该系统能够以不到1厘米的精度测量2米的距离。但这只是理论上的数据,早期的测评显示,实际操作的精度无法达到这种水平。
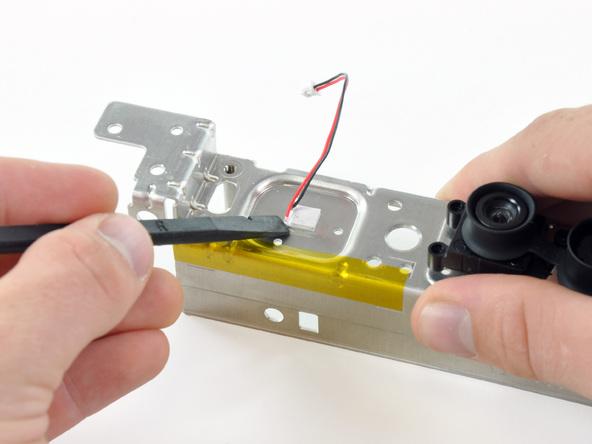
全部4个麦克风都通过一个电缆连接器与主板相连
第12步
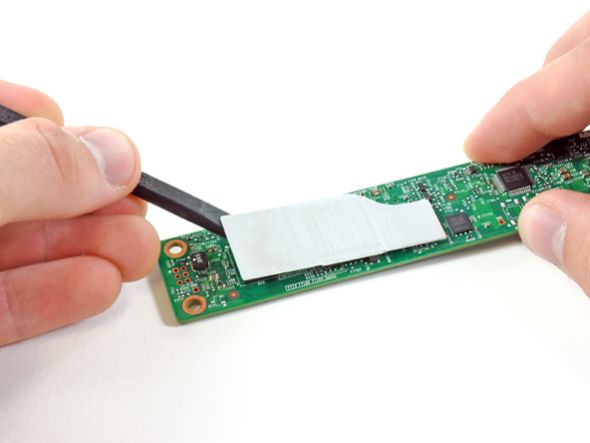
- 全部4个麦克风都通过一个电缆连接器与主板相连。
- 将3个连接器和7个T10 Torx螺丝拆掉后,顶部的电路板便可以与另外两个电路板分离。
加热散热片
将散热片从主板上拆下
第13步
- 对散热片进行加热后,便可利用挑线器将它从主板上拆下。不过,得费点劲。
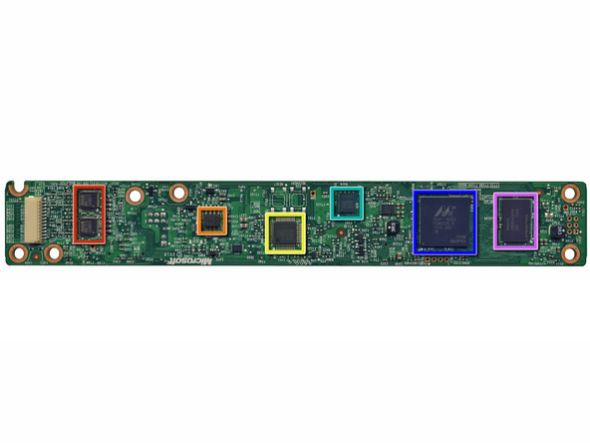
Kinect的大脑
第14步
- 这是Kinect的大脑。市场研究公司UBM TechInsights的员工帮助我们识别出了很多芯片。
- 红:Wolfson Microelectronics WM8737G——配备麦克风前置放大器的Stereo ADC。
- 橙:Fairchild Semiconductor FDS8984——N-Channel PowerTrench MOSFET。
- 黄:NEC uPD720114——USB 2.0集线器控制器。
- 青:H1026567 XBOX1001 X851716-005 GEPP
- 蓝:Marvell AP102——附带摄像头接口控制器的SoC
- 紫:海力士H5PS5162FF 512MB DDR2 SDRAM
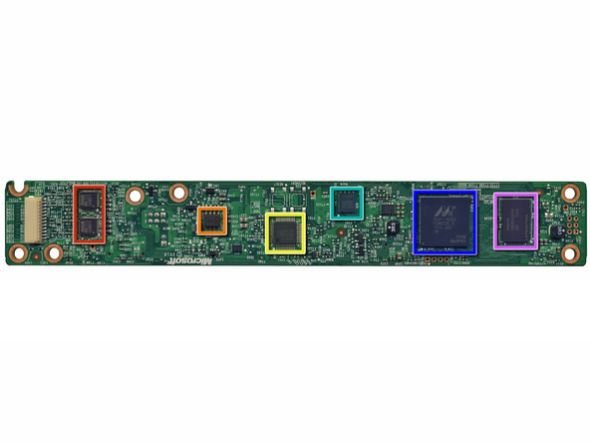
微软Kinect的大脑
第15步
- 红:Analog Devices AD8694——四芯、低耗、低噪、CMOS 轨对轨输出运算放大器
- 橙:德州仪器ADS7830I——配备I2C接口的8-Bit、8通道数模转换器
- 黄:Allegro Microsystems A3906——低功率步进器和单/双直流电机驱动器。
- 青:意法半导体M29W800DB——8Mbit NV闪存
- 蓝:PrimeSense PS1080-A2——SoC成像传感器处理器
微软Kinect大脑
第16步 - 红:这块电路板配备德州仪器TAS1020B USB音频控制器
- 橙:一个Kionix KXSD9加速计也增强了Kinect的感应性能。
越往里拆,线就越多
这是谁?ET,还是霹雳5号?
第17步
- 越往里拆,线就越多。
- 这是谁?ET,还是霹雳5号?
在Kinect中找到的4个麦克风中的3个
第18步
- 这就是我们在Kinect中找到的4个麦克风中的3个。
- 总共有4个向下的麦克风:右侧3个,左侧1个。
- 微软认为最佳的声音搜集方向应该是朝下的。
- 为了正确识别语音指令,Kinect必须对房间中的语音进行校准。不过,如果你改变了房间内的家具摆放,就必须要重新校准。
第19步
- 这个电路板由4个支座支撑,我们用钳子将其取下,但是5毫米的螺帽扳手或许更合适。
电路板
- Adafruit网站为首支编写出开源Kinect驱动的团队提供2000美元奖金。对于业余机器人项目而言,Wiimote非常有用。而Kinect的高端感应器也肯定能够极大地促进机器人研究。
第20步
- 我们终于将电线/数据线从Kinect外壳上取下。
微软Kinect使用了类似于USB的接头。Kinect的功率为12瓦,远高于标准USB接口2.5瓦的功率。
- 在一系列复杂的感应器和传感器中,我们拆下了状态指示LED灯。
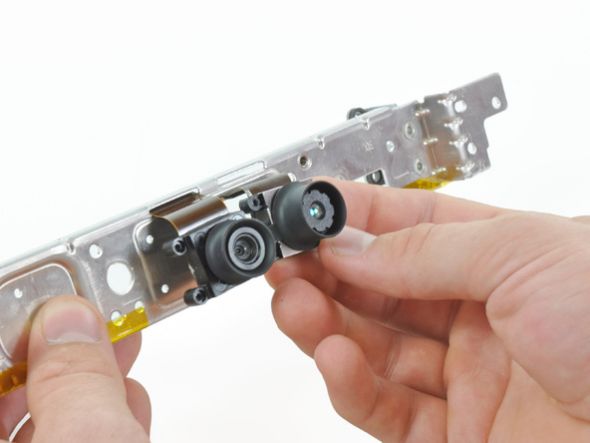
两个摄像头和红外发射器
第21步
- 拆掉了更多螺丝后,两个摄像头和红外发射器便可以轻易从金属衬条上拆下。
红外发射器和金属衬条之间,夹着一个零件,它的作用有可能是冷却红外发射器
- 在红外发射器和金属衬条之间,夹着一个零件,它的作用有可能是冷却红外发射器。
两个摄像头和红外发射器依次排开
第22步
- 两个摄像头和红外发射器依次排开。
通过景深摄像头和色彩摄像头的配合,Kinect就可以将实物的3D影像实时整合到屏幕图像中。
Kinect输入系统的关键就是由麦克风和摄像头组成的感应器系统
- 除了语音指令和手势外,没有任何形式的用户输入,因此Kinect输入系统的关键就是由麦克风和摄像头组成的感应器系统
拆解完毕
第23步
- Kinect现在已经被完全拆解了。
- 优点:
设计非常模块化,可以在出现问题时替换单个的零部件(例如马达)。组装过程没有用到焊接。
- 缺点:
微软使用了4种螺丝,包括一些令人痛恨的安全螺丝:T6、T10、T10安全螺丝以及Phillips #0。
由于没有服务手册,所以修理起来恐怕会比较困难。微软还没有提供服务手册。如果有足够的需求,我们会出版一本。
来源 17173


 IP卡
IP卡 狗仔卡
狗仔卡 发表于 2010-11-6 19:05:06
发表于 2010-11-6 19:05:06
























 提升卡
提升卡 置顶卡
置顶卡 变色卡
变色卡 显身卡
显身卡